NXT FaceShooter
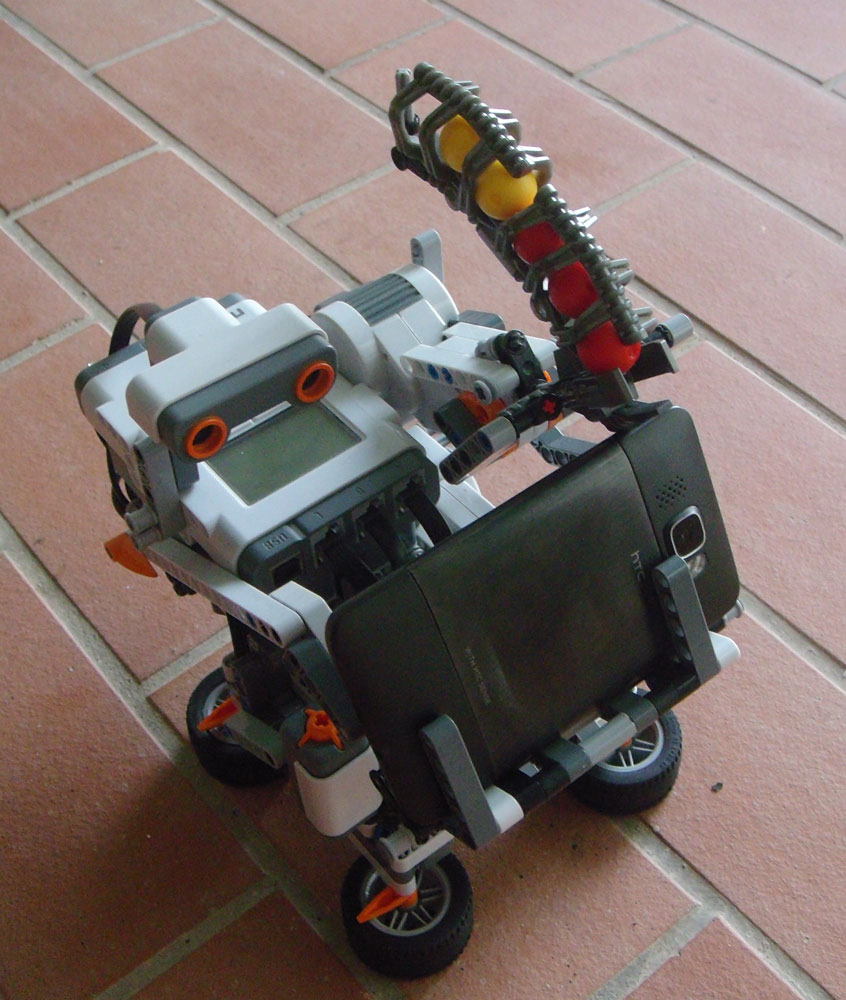
A Lego Mindstorm robot holding an Android phone is connected to a Windows PC via Bluetooth. The PC receives the phone’s camera feeds over WiFi and processes them using OpenCV to detect the human’s face. The obtained data is being used in a C++ application and the final commands will be transmitted to the NXT unit to do the shooting.
Techniques
- Robotic movement and sensing control via Bluetooth (Using Monobrick C++ Communication library for NXT)
- Wifi camera feeds streaming (Using IP Webcam Android app and MJPG-Streamer)
- Face detection using Haar classifiers (Using OpenCV library)
Demo
Other contributors:
Bahador Saket